¶ リミットスイッチ
リミットスイッチは機械原点を探し出す・設定する場合に用いられます。
ホーミング(原点復帰)動作を行い、スイッチの入った位置を機械原点とすることで毎度同じ位置を機械原点位置を設定することができます。
電源断により現在位置は失われてしまうため、毎回同じ指定する上で必要な装置となります。
加工では機械原点(スイッチの位置)まで工具を上げてから移動する、といった命令があるため加工においても重要な位置要素となります。
¶ 1. リミットスイッチについて
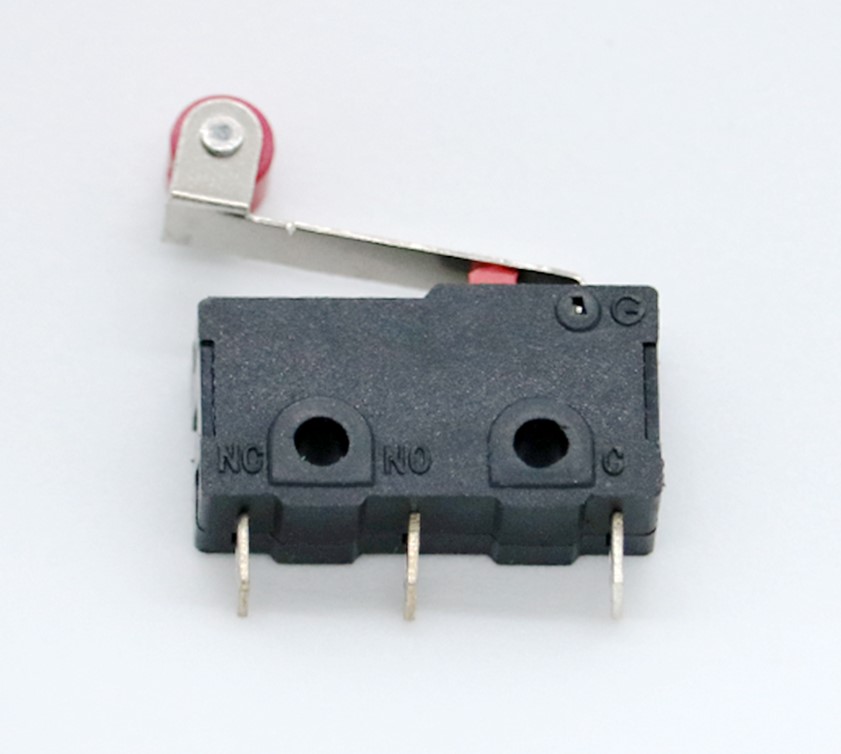
リミットスイッチにはNC、NO、COMの3つの端子があります。
| 端子名 | 意味 |
|---|---|
| NC(ノーマルクローズ) | スイッチOFF時に導通する端子 |
| NO(ノーマルオープン) | スイッチON時に導通する端子 |
| COM(コモン) | NO、NCの対となる端子 |
COMは必ず使いますが、NOとNCのどちらを使うかは制御基板の設定で変更することができます。
基本的にはどちらを使っても構いません。設定にて切り替えることができます。
ノイズの影響による誤動作を避けるため、NCとCOM端子に接続して使うことを推奨します。
¶ 2. 機械側とりつけ
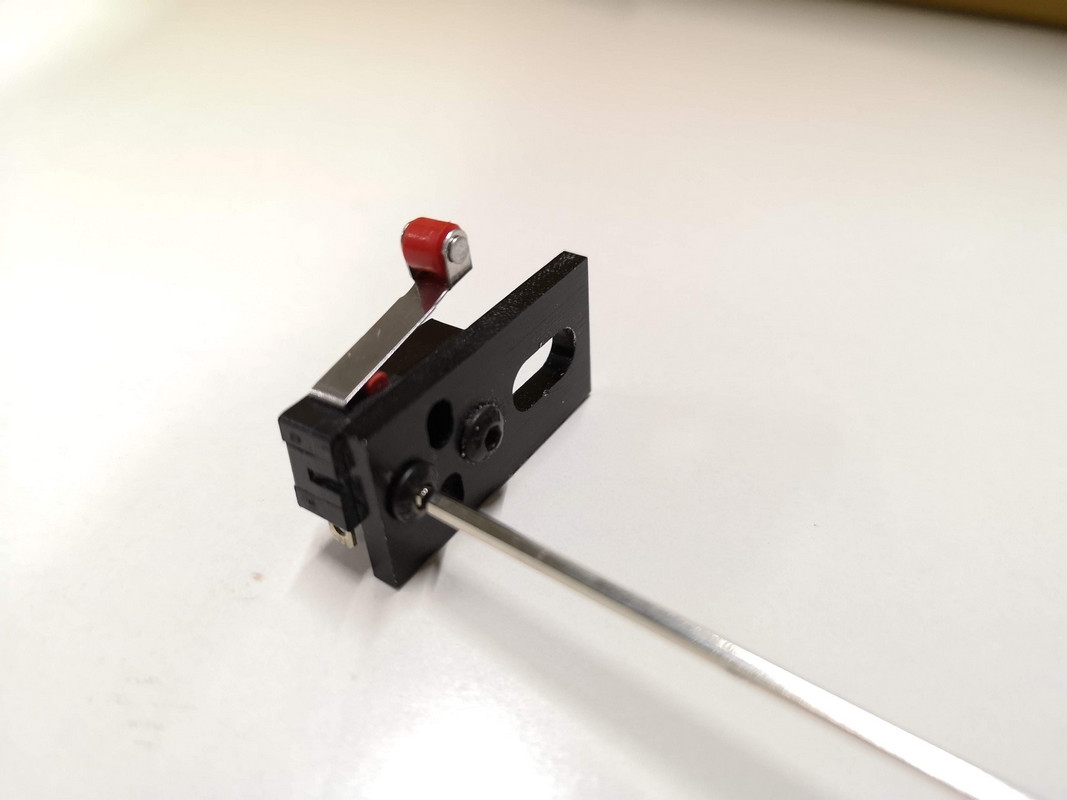
付属の固定用プレートにリミットスイッチを取り付けます。
リミットスイッチの固定用プレートへの固定方法は設定する軸方向やスイッチを入れたい位置によって固定方法を変更・工夫してください。
¶ 2.1 取り付け推奨位置
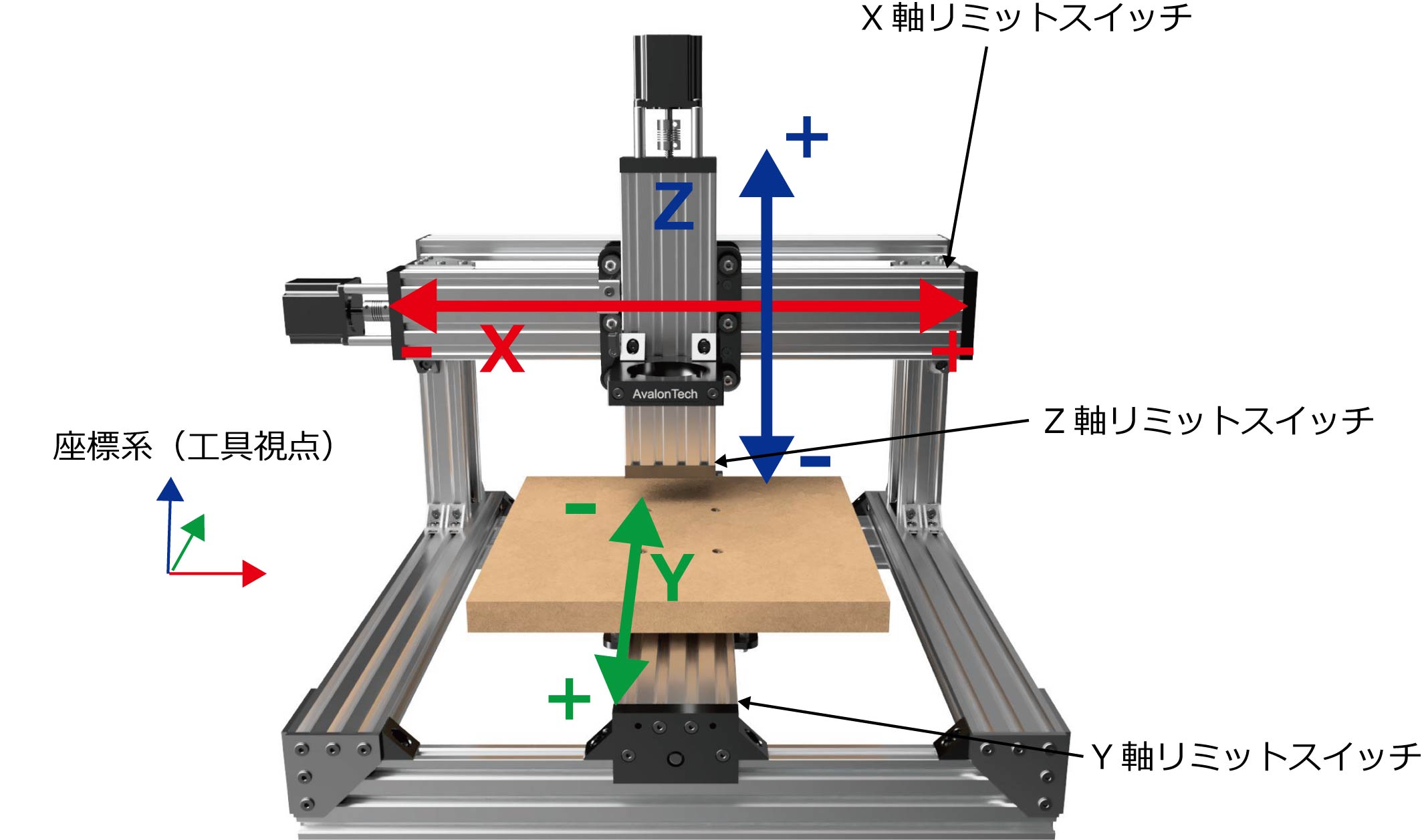
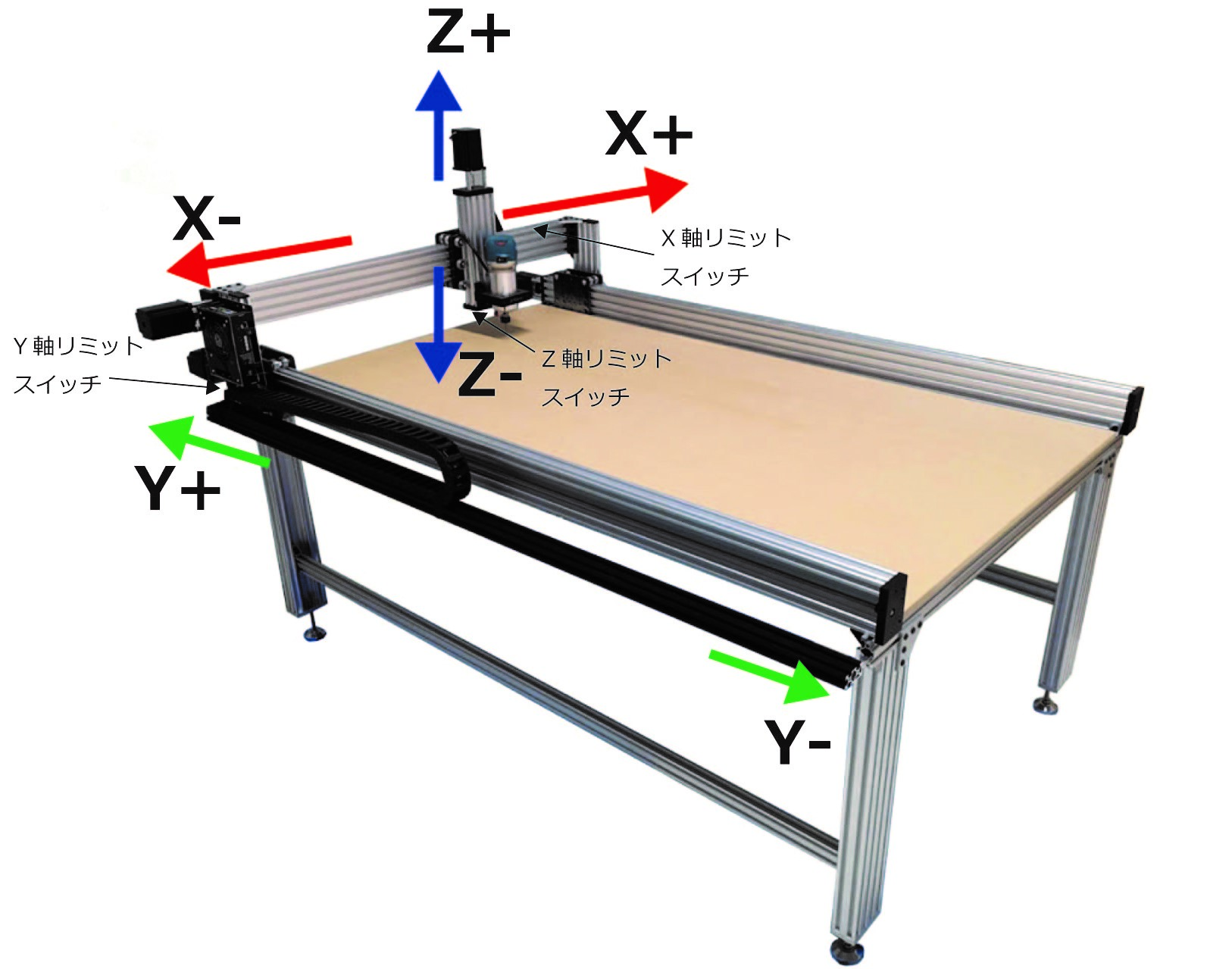
軸の構成は人それぞれですが、基本的に右手系に従って軸を設定します。
また通常は軸の+方向に原点復帰動作を行うことから、リミットスイッチの設置場所は下図のように軸の+方向端に動いた際に物理的に接触するに部分に置くことを推奨します。
説明ではすべて各軸のプラス側の端にリミットスイッチを取り付ける例として説明しています。
取り付け後は電動で動作確認をする前に、各軸がプラス端に移動したときにリミットスイッチのセンサー部に接触することを確認してください。
電源を抜いた状態でモーターのカップリング部分を手で回すことで軸を動かすことができます。
¶ C-Beam Machine系
¶ ArtCNC系
参考:
https://www.monotaro.com/s/pages/readingseries/machiningcenterkiso_0105/
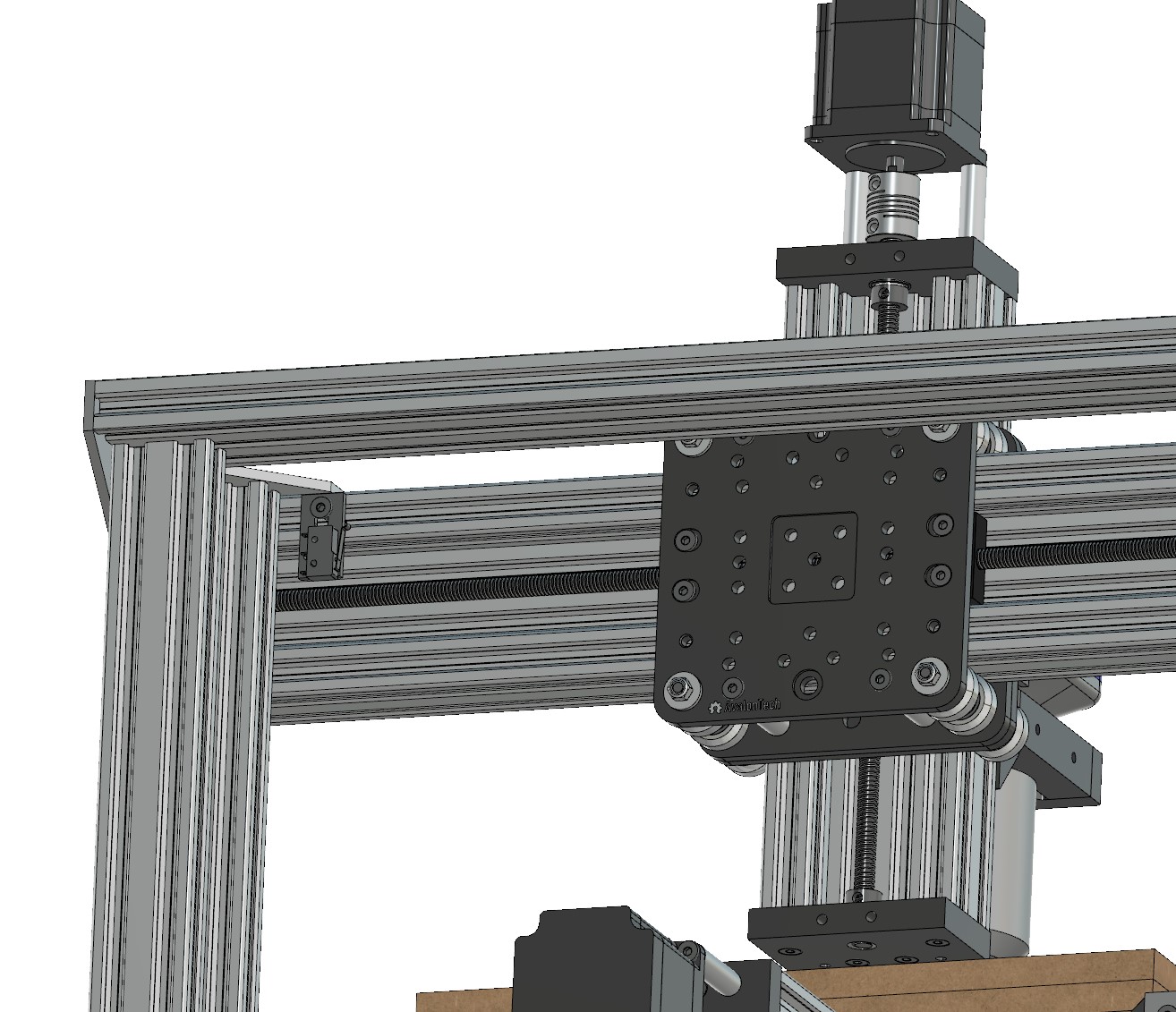
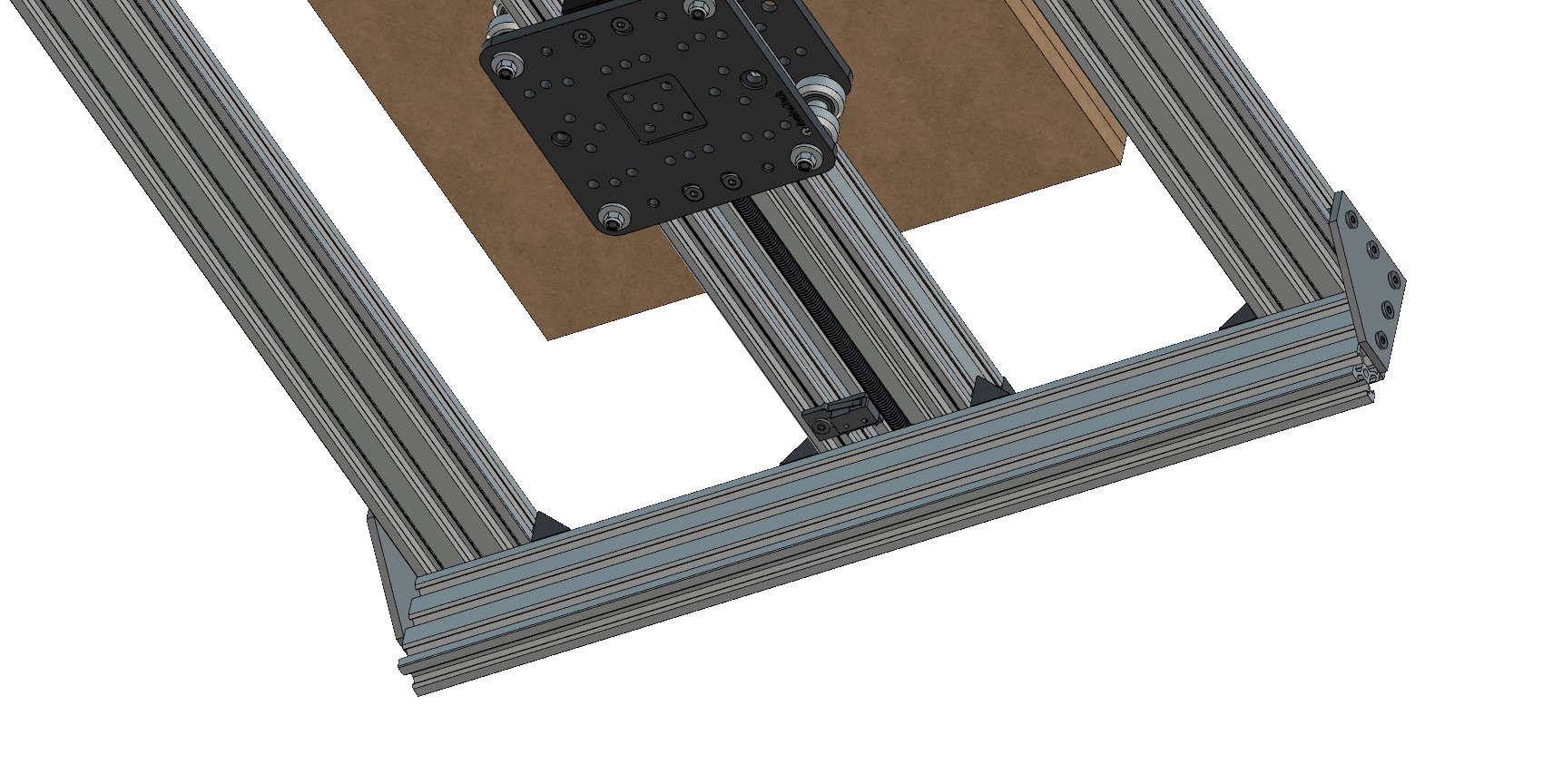
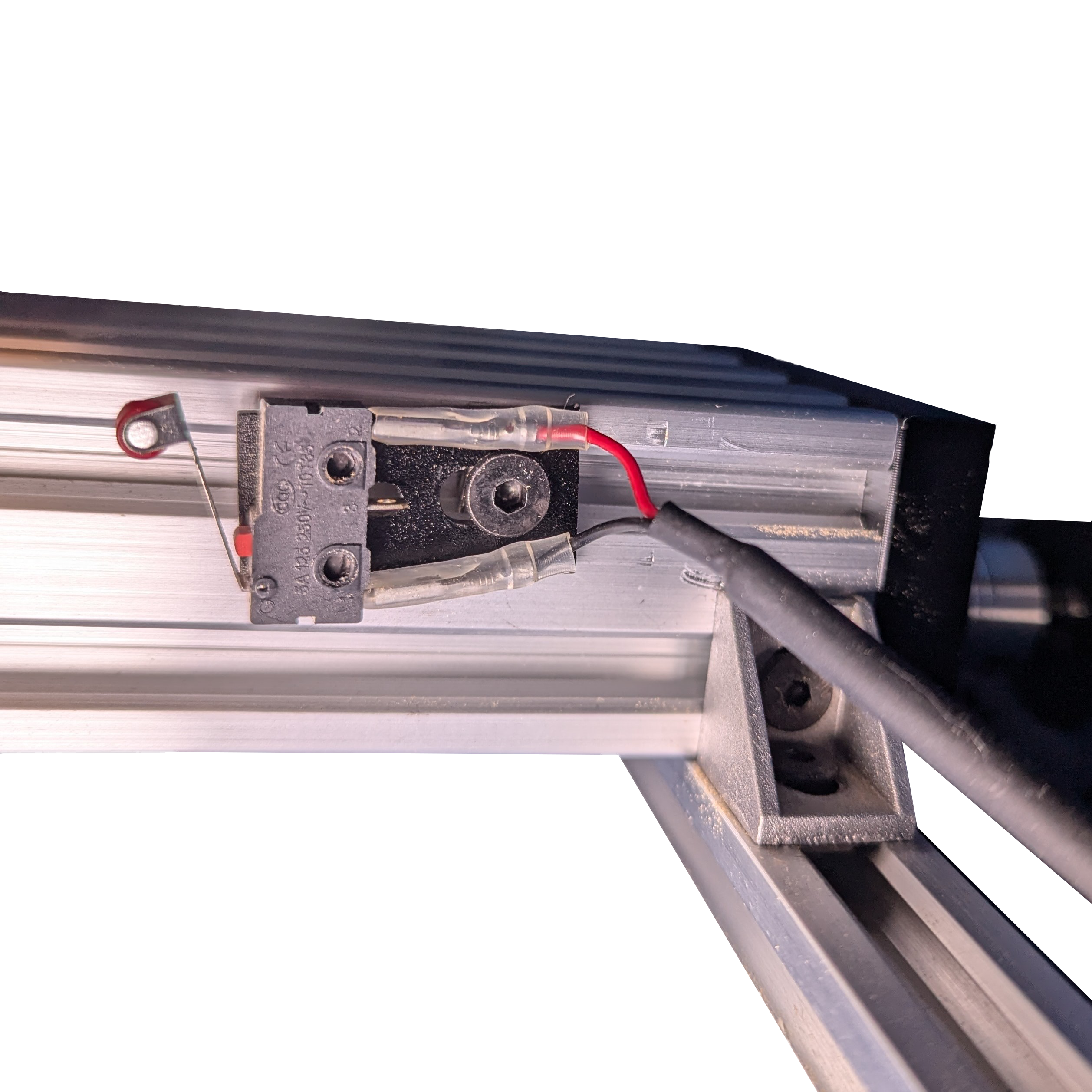
¶ 2.2 XY軸リミットスイッチ取り付け例
XY軸はレールのプラス側端にリミットスイッチ固定用プレートを付属の差し込みTナットとM5ボルトにてフレームに固定します。
C-BeamMachineシリーズのY軸はテーブル側が動くため、工具が一番Y軸方向の奥側となる位置(マシン正面からみて手前側)にリミットスイッチを取り付けます。
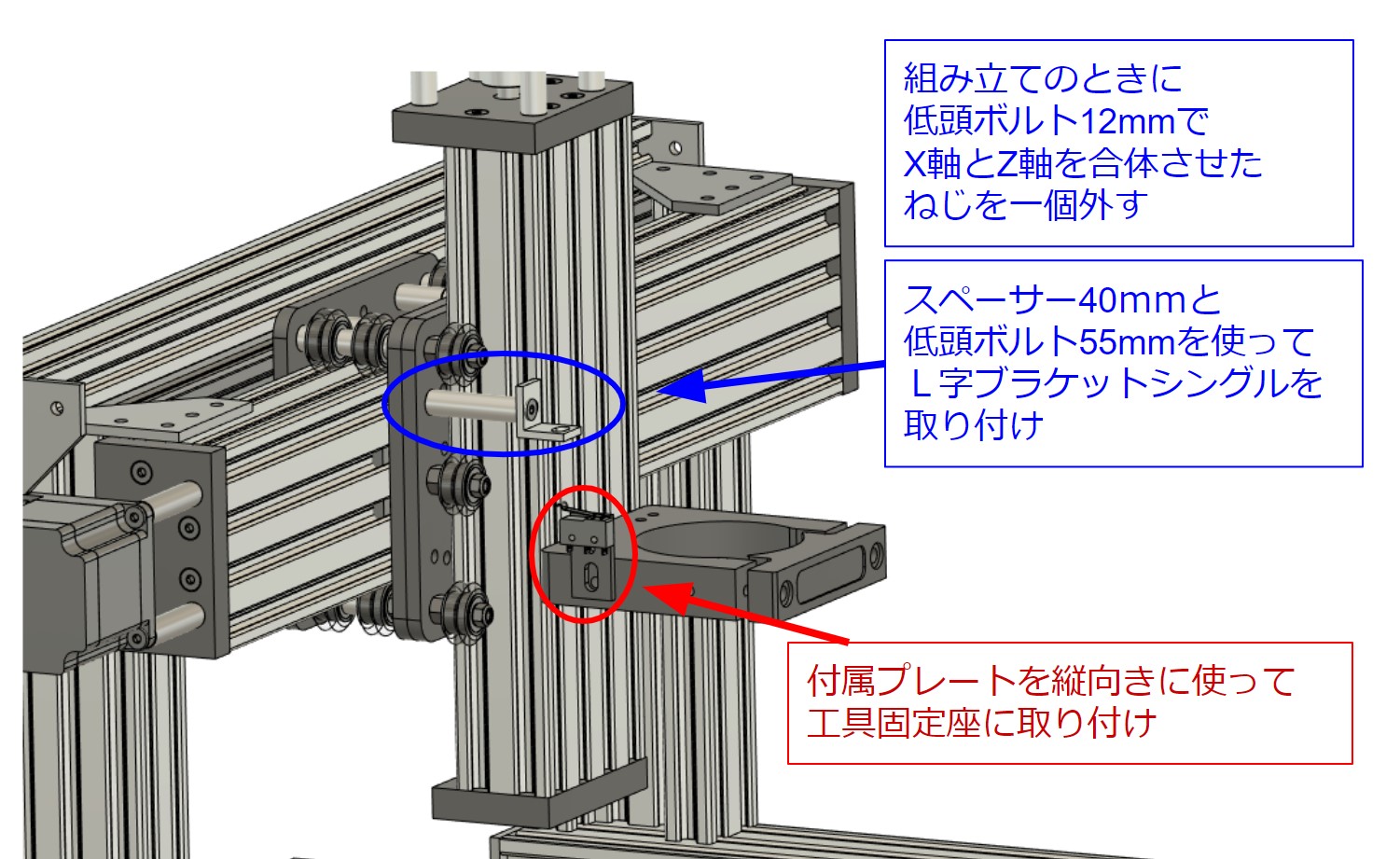
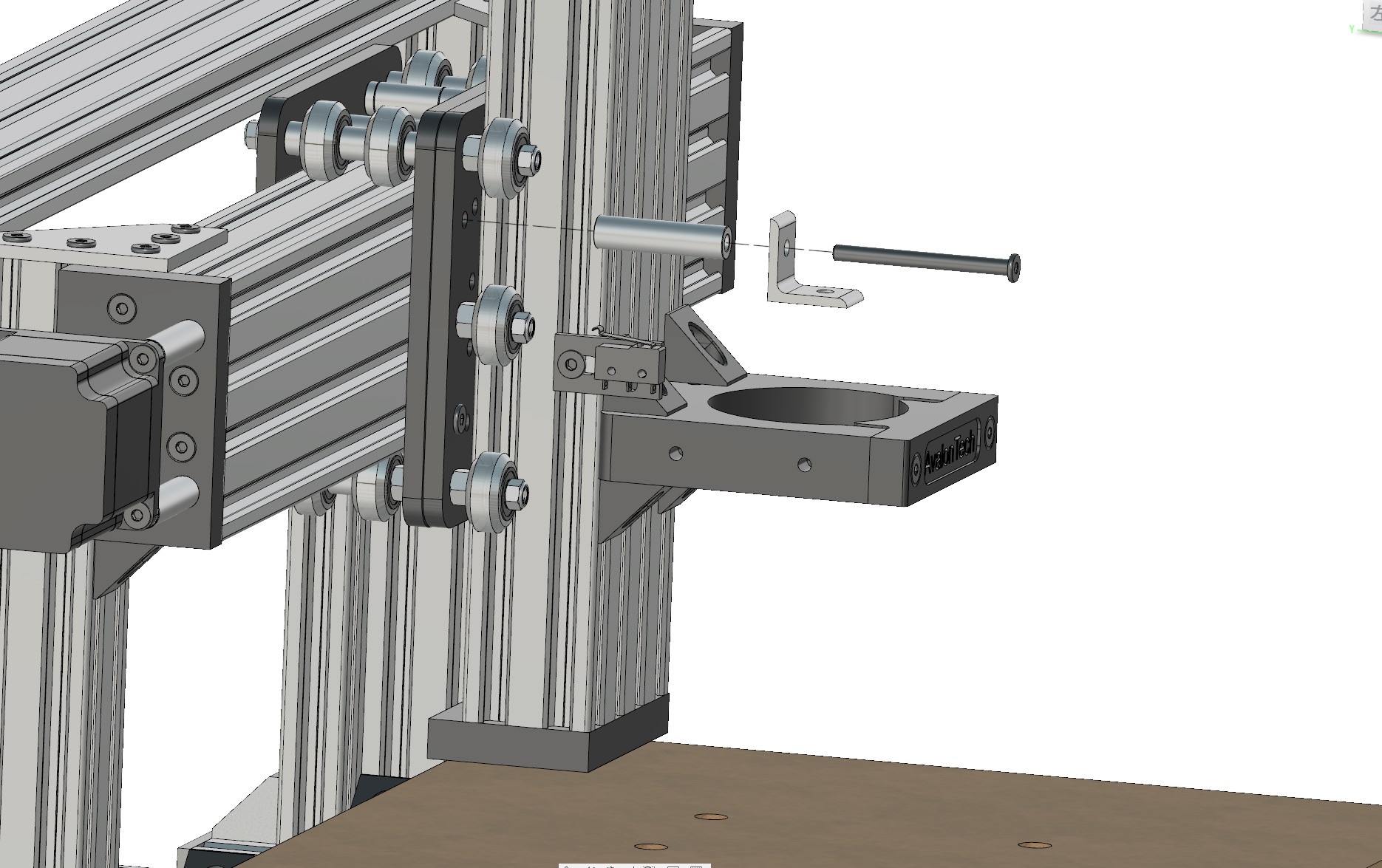
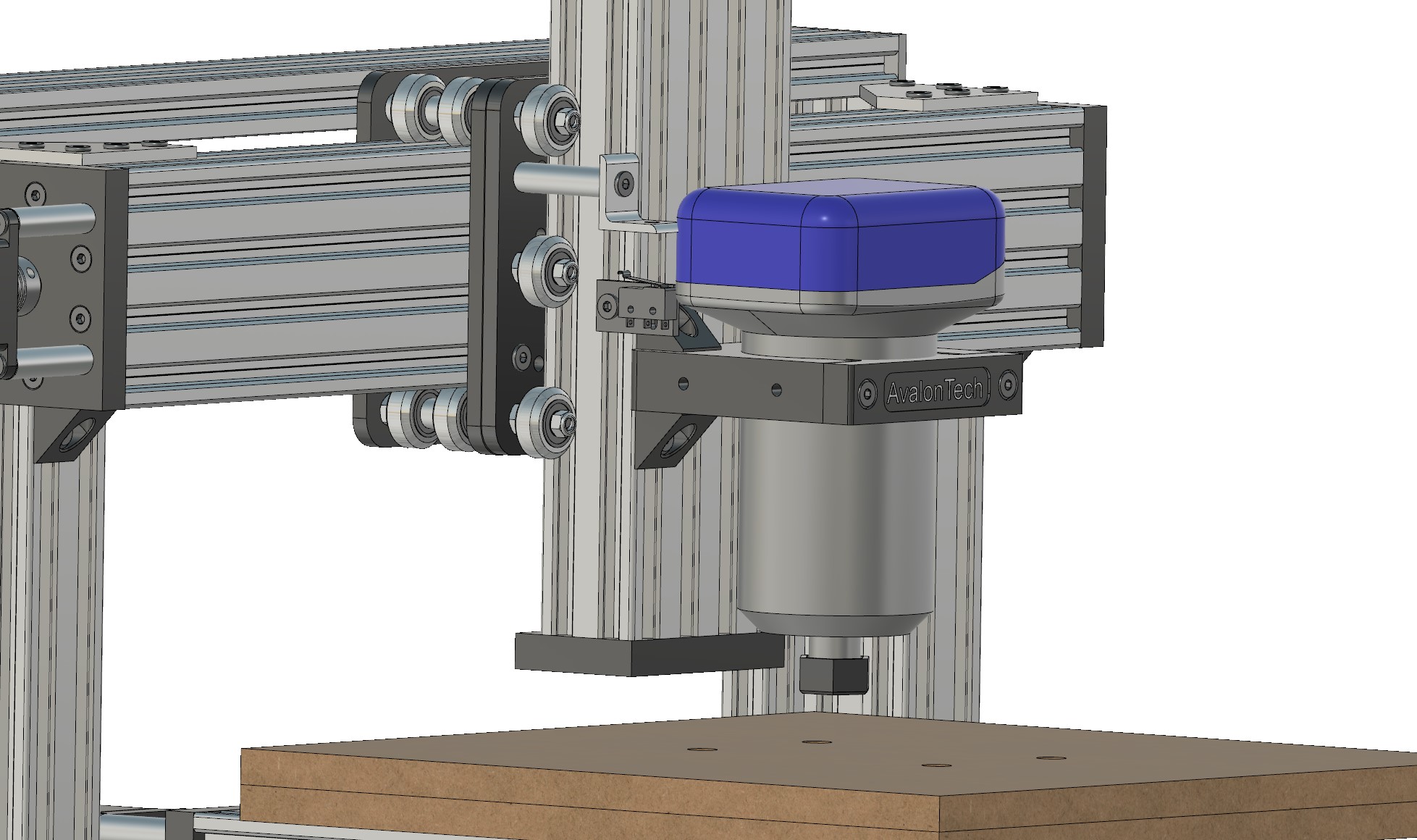
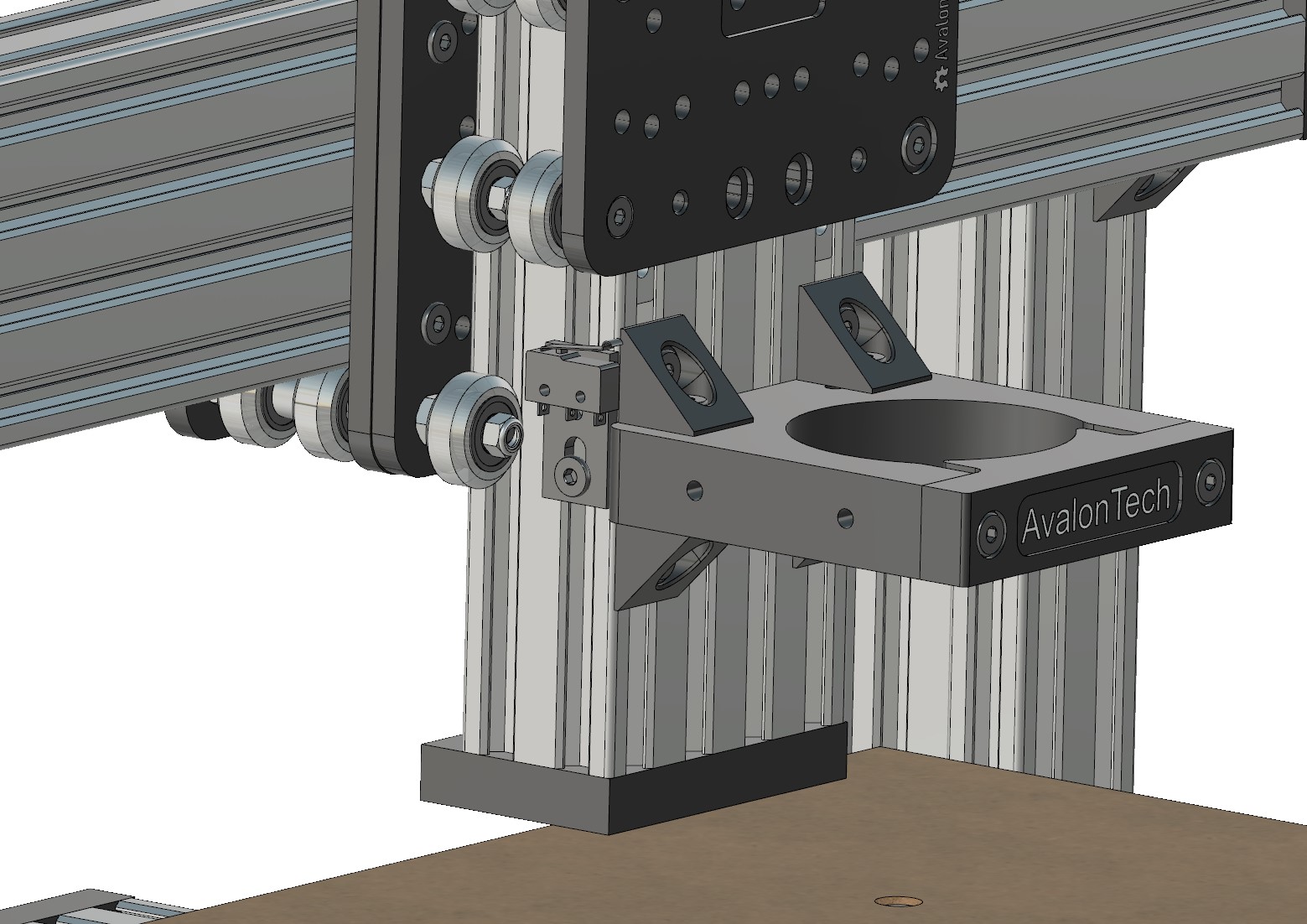
¶ 2.3 Z軸リミットスイッチの取り付け例
スペーサー・ブラケットで固定(付属)
¶ 3. 制御基板側取り付け
※圧着済みリミットスイッチケーブルがある場合は圧着工程はスキップします。
圧着をしコネクタを作成する場合はこちらをご参照ください。
Duetの圧着に関して
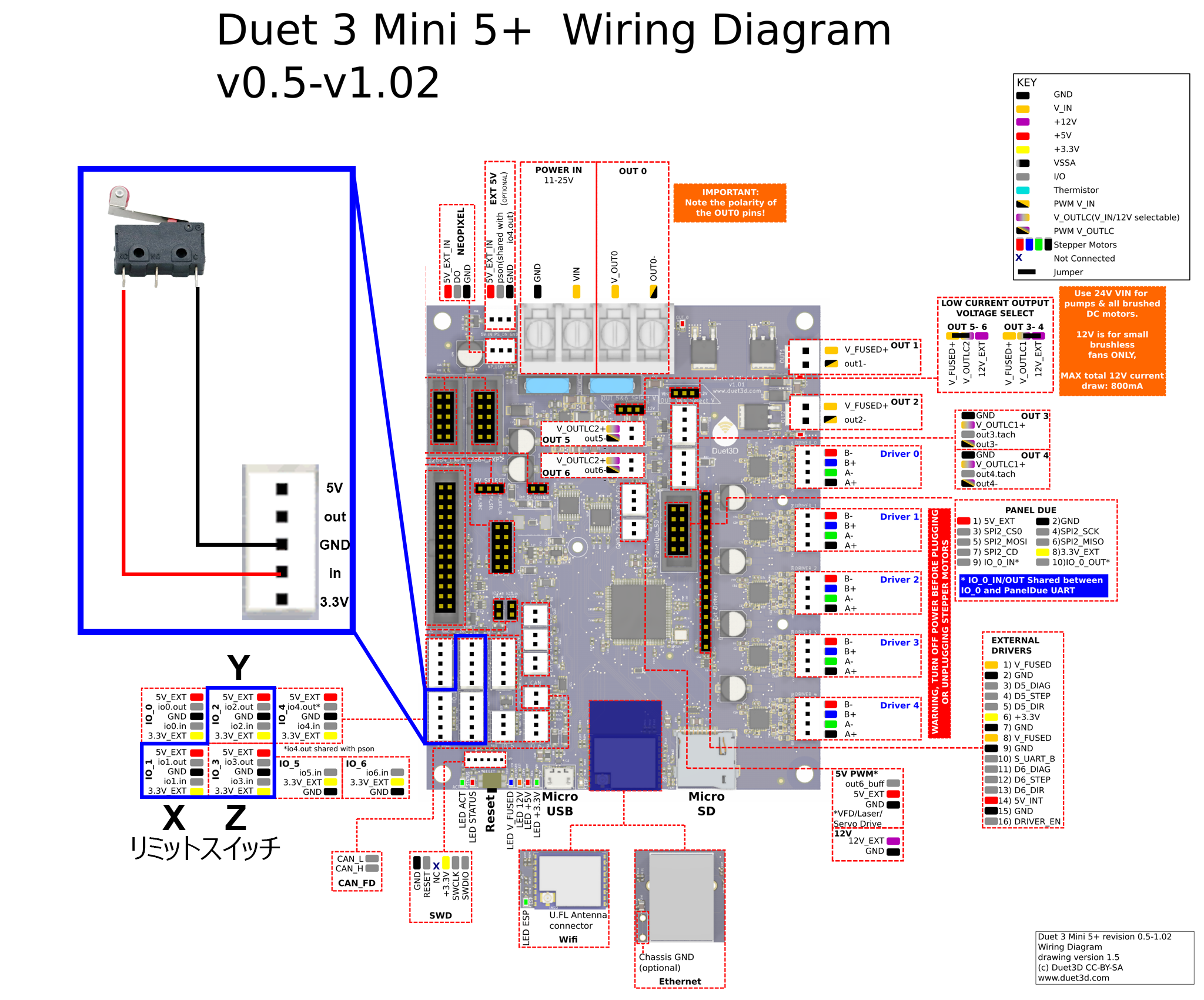
デフォルト設定ではリミットスイッチはIO1、IO2、IO3に取り付けます。それぞれX、Y、Z軸用のリミットスイッチとして割り振りをしています。
コネクタを以下の図及び基板上のIO番号のプリント表示を参照して接続してください。
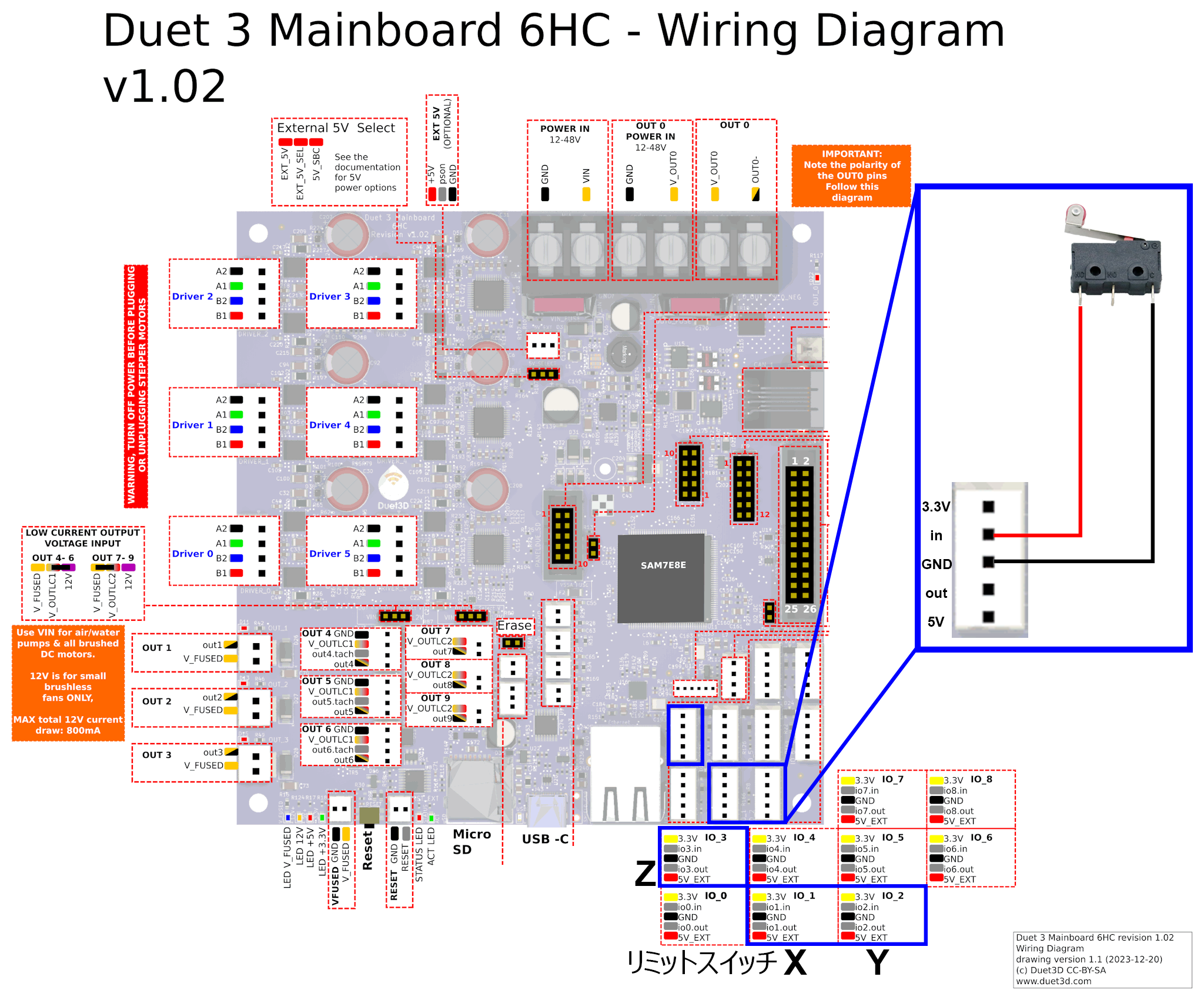
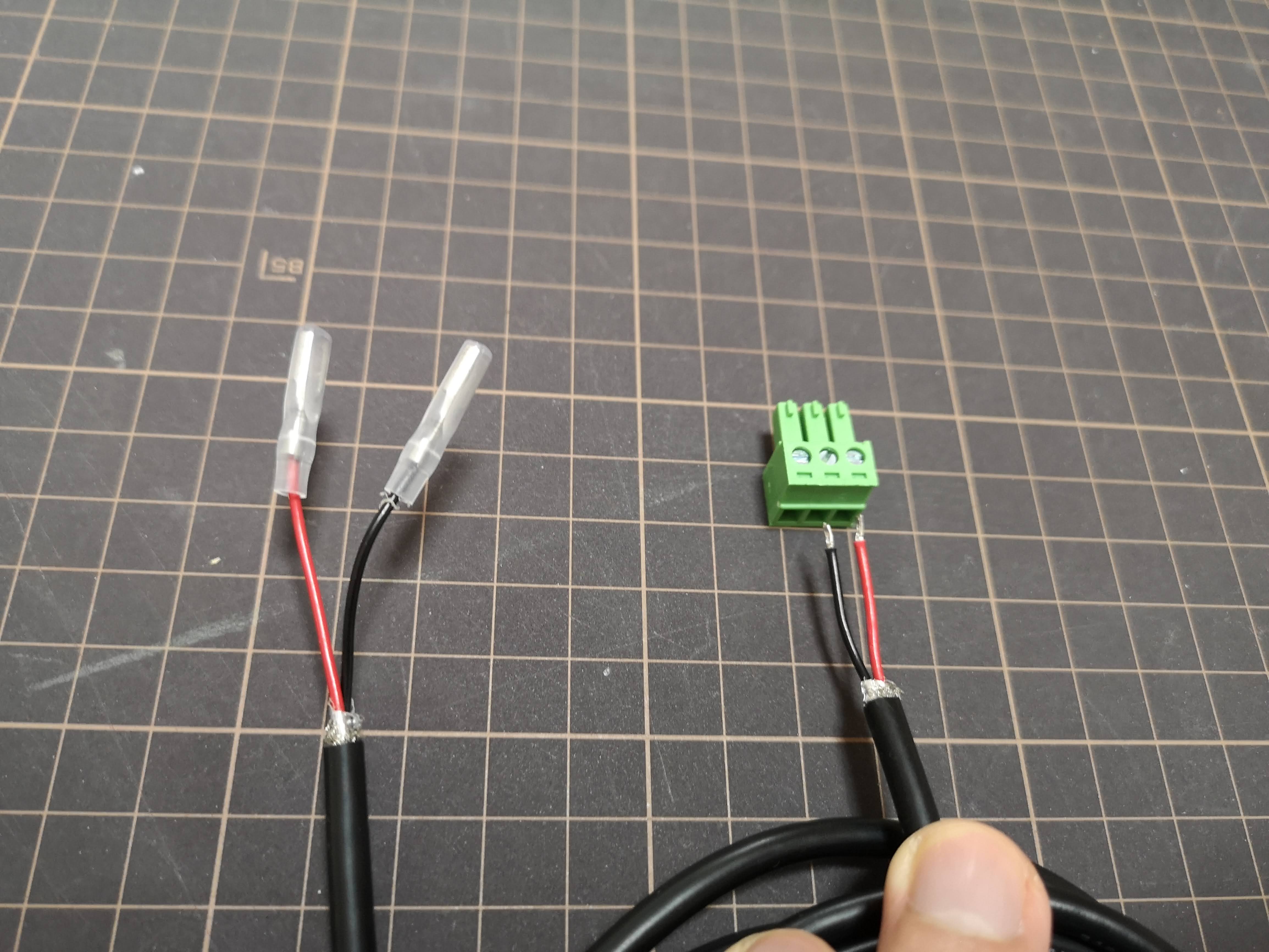
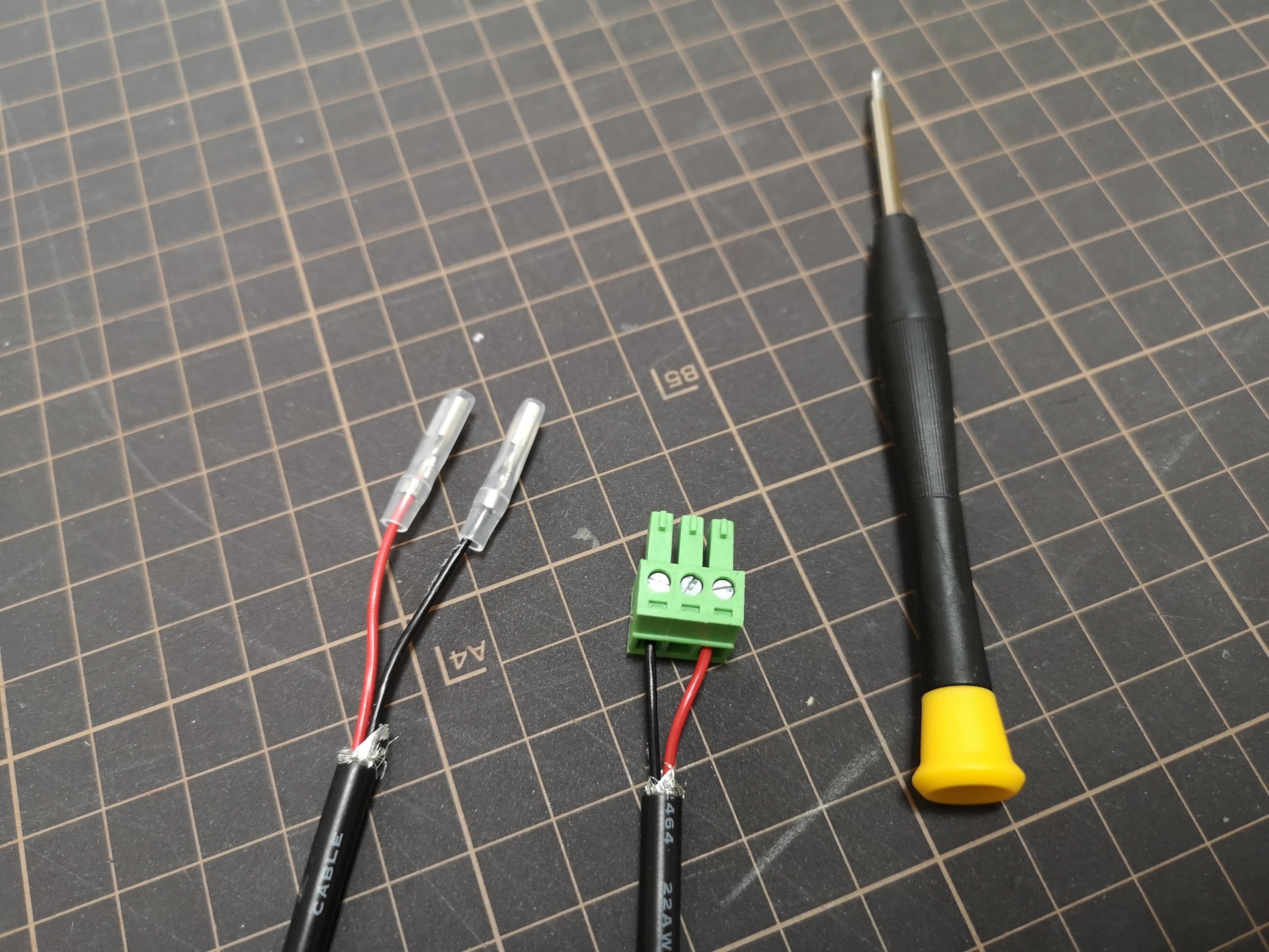
リミットスイッチ側のケーブルにはファストン端子を圧着し接続します。
※圧着済みリミットスイッチケーブルがある場合は圧着工程はスキップします。
リミットスイッチの両端の端子(COM端子とNC端子)に接続します。
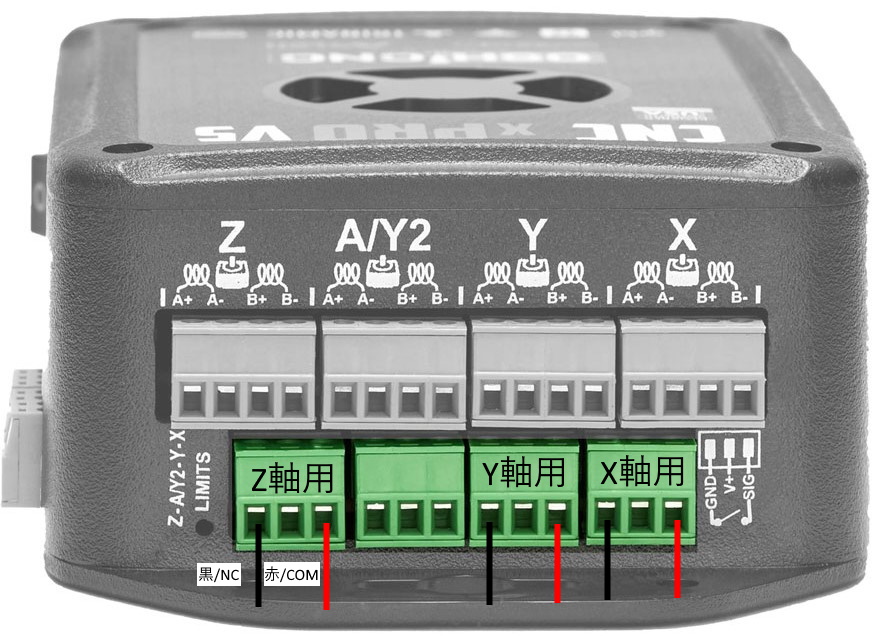
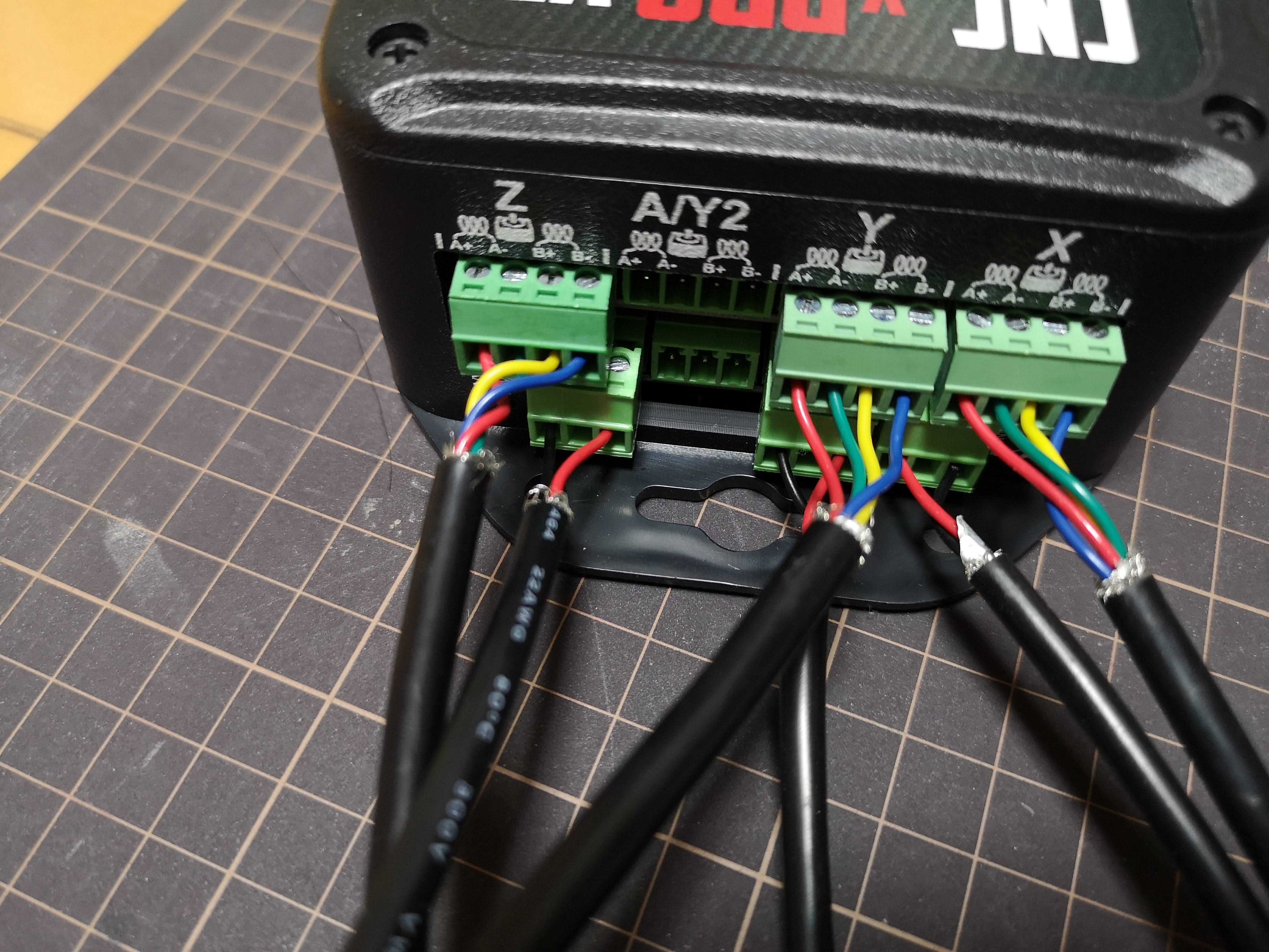
CNC xPRO v5の場合は先端にコネクタを取り付け、制御基板のモーター端子の下に接続します。
コネクタには線を差し込む箇所が3箇所ありますが、基本的には真ん中は使わずに左右の2つの穴を使用します。
| CNCxPRO v5の接続口 | 線の色 | リミットスイッチの端子 |
|---|---|---|
| GND | 黒 | COM |
| SIG | 赤 | NC |
¶ 4. 動作確認
以下の順で動作確認を行ってください。
- こちらよりEndstopsMonitor-◯◯◯.zipをダウンロードしてください。
https://github.com/Duet3D/EndstopsMonitorPlugin/releases - WebUI (DuetWebControl)のメニュー→プラグイン→外部プラグインよりダウンロードしたzipファイルをアップロード

- EndstopMonitorのプラグインを有効化
- メニューの設定→機械→エンドストップにリミットスイッチの検知状況が表示されるようになります。
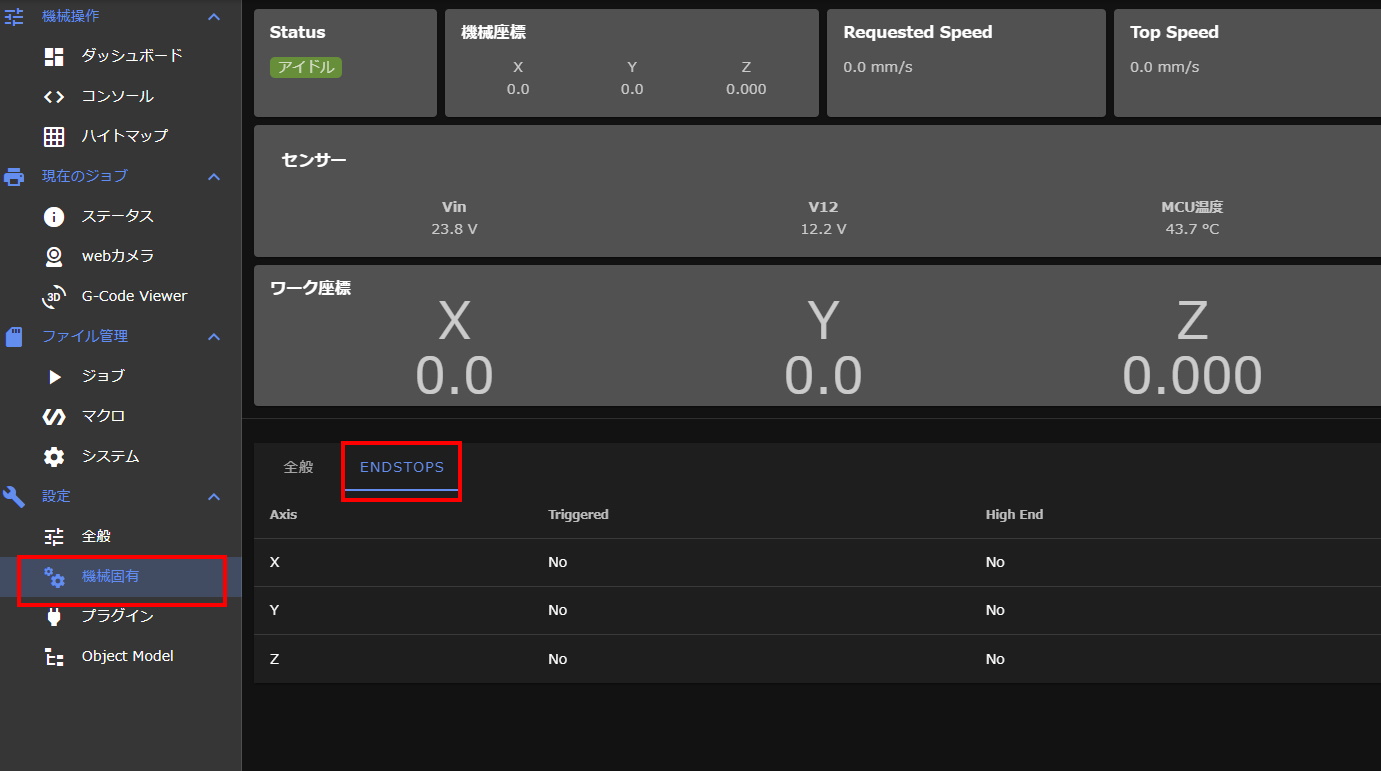
- 手でリミットスイッチを押した際にリミットスイッチが検知されているかどうかを確認
M119コマンドを利用してスイッチの検知状態を確認する方法もあります。
https://docs.duet3d.com/en/User_manual/Reference/Gcodes#m119-get-endstop-status
以下の順で動作確認を行ってください。
- (NOとCOM接続の場合確認、NCとCOM接続の場合はスキップ)
リミットスイッチを手で押した際にCNCxPRO v5のリミットスイッチ接続部にあるLEDは点灯するか。 - リミットスイッチを押した状態で、CNCjsにて
?コマンドを送信したときにコンソール上に下記のように制御基板のステータスが表示されます。
<Alarm|WPos:0.000,-0.000,0.000|Bf:15,128|FS:0,0|Pn:X>
このPn:Xの部分がX軸のリミットスイッチを検知していることを示しています。
全てのスイッチが同時に押されている場合はPn:XYZとなります。
リミットスイッチを手で押して?コマンドを送信して全てのリミットスイッチが検知されるか確認してください。
2.が動作しない場合、パラメータ$5の値を変更して再度試してみてください。
現在値はCNCjsのコンソールにて$5と入力すると現在値が分かります。現在値が$5=0の場合は$5=1、$5=1の場合は$5=0としてみて再度お試しください。
¶ 5. 設定
こちらの内容は一部、動作確認の内容と重複します。
以下の手順で実施します。
- 移動方向設定・確認
- 設定変更
- すぐに停止できるようにした上でホーミング実施
¶ 移動方向の設定・確認
AvalonTech配布している設定ファイルではホーミングは各軸+方向へ移動としています。
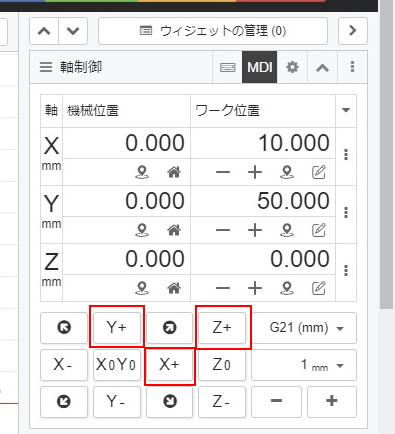
各軸の移動を試してみて+方向ボタンを押した際にリミットスイッチの当たる方向に動くかどうか確認してください。
+方向に移動してリミットスイッチが当たる方向と逆になっている場合は、パラメータの変更によって軸移動方向を反転させるか、モーターの線の入れ替えにてモーターの回転方向を変更してください。
参考:
動作確認#移動方向設定
https://bbs.avalontech.jp/t/topic/789
¶ 設定変更
通常の軸方向の反転はconfig.g内のM569 P〇〇 S〇のSパラメータを変更します。
ホーミングの動作を変更する場合はhomeall.g、homex.g、homey.g、homez.gを編集します。
¶ ホーミング実施
誤った方向に移動した場合や、リミットスイッチを検知したにも関わらず停止しない場合などすぐに停止できるよう下記のいずれかを準備した上でホーミングを実施してください。
- 電源に手をかけておく
- WEBUIの緊急停止ボタンを押せるようにしておく
以下の手順で実施します。
- 移動方向設定・確認
- パラメーター設定
- すぐに停止できるようにした上でホーミング実施
¶ 移動方向の設定・確認
ホーミングはデフォルトで各軸+方向へ移動します。
CNCjsにて各軸の移動を試してみて+方向ボタンを押した際にリミットスイッチの当たる方向に動くかどうか確認してください。
+方向に移動してリミットスイッチが当たる方向と逆になっている場合は、パラメータの変更によって軸移動方向を反転させるか、モーターの線の入れ替えにてモーターの回転方向を変更してください。
参考:
動作確認#移動方向設定
https://bbs.avalontech.jp/t/topic/789
¶ パラメーター設定
まず$22=1としてホーミング機能を有効化のみを行います。
その他の設定は環境や欲しい機能に合わせて変更となります。
リミットスイッチに関連するパラメーターは以下となります。
| パラメーター | 設定値 | 設定値名称 | 説明 |
|---|---|---|---|
| $5 | 0(無効)、1(反転) | Limit pins invert | リミットスイッチのトリガーを反転させます。LOW→HIGH(0)、HIGH→LOW(1)で検知するかを決める部分です。 |
| $20 | 0(無効)、1(有効) | Soft limits | ソフトリミットの有効化。$130~$132で指定した座標以上移動しようとすると移動せず停止するようになります。 |
| $21 | 0(無効)、1(有効) | Hard limits | ハードリミットの有効化。移動中にリミットスイッチに当たると停止するようになります。 |
| $22 | 0(無効)、1(有効) | Homing cycle | ホーミング機能の有効化 |
| $23 | 反転したい軸(ビット指定) | Homing dir invert | ホーミング方向の反転。軸移動方向の反転指定と同じ指定方法となります。 |
| $27 | プルオフ移動距離(mm) | Homing pull-off | ホーミングでスイッチに当たったあとにスイッチから離れる距離。 |
¶ ホーミング実施
誤った方向に移動した場合や、リミットスイッチを検知したにも関わらず停止しない場合などすぐに停止できるよう下記のいずれかを準備した上でホーミングを実施してください。
- 電源に手をかけておく
- CNC xPROの電源を切れるようにしておく
- CNCjsのリセットボタンを押せるようにしておく
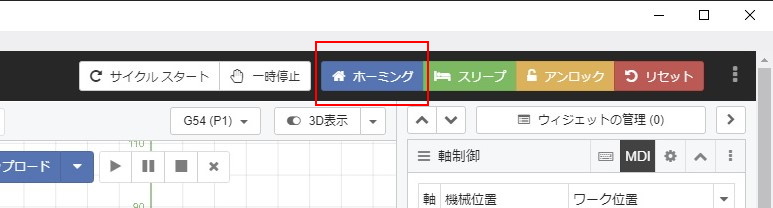
ホーミングはCNCjsの右上ボタンより実施できます。
¶ 参考
https://github.com/Spark-Concepts/xPro-V5/wiki/Rear_Panel
https://docs.duet3d.com/User_manual/Connecting_hardware/Sensors_endstops
https://bbs.avalontech.jp/t/cncxpro/419
https://bbs.avalontech.jp/t/duet3/604