¶ Zプローブ
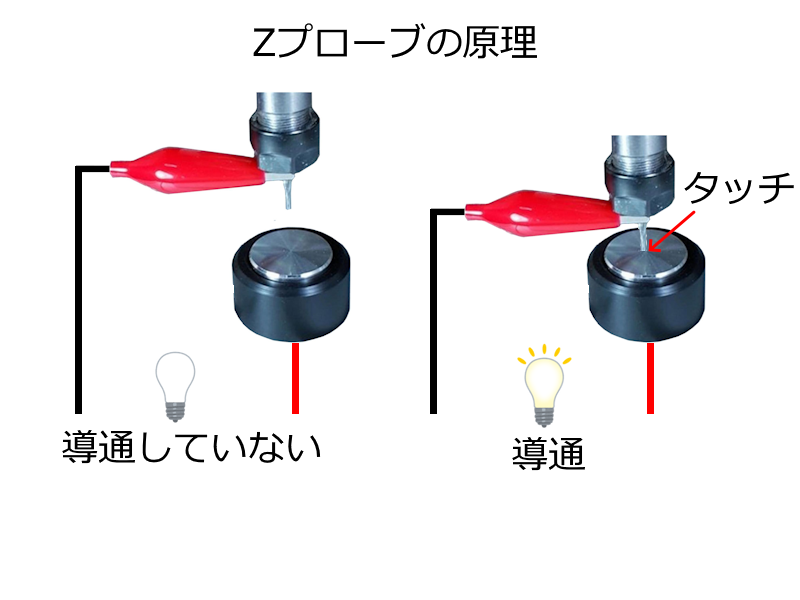
Zプローブは刃物に取り付けるクリップと、刃物をタッチさせるタッチプレートの2つから構成されています。
Zプローブでは刃物とタッチプレート間が接触した時に電気的に導通することを利用し、タッチした位置の検出を行います。
¶ 配線
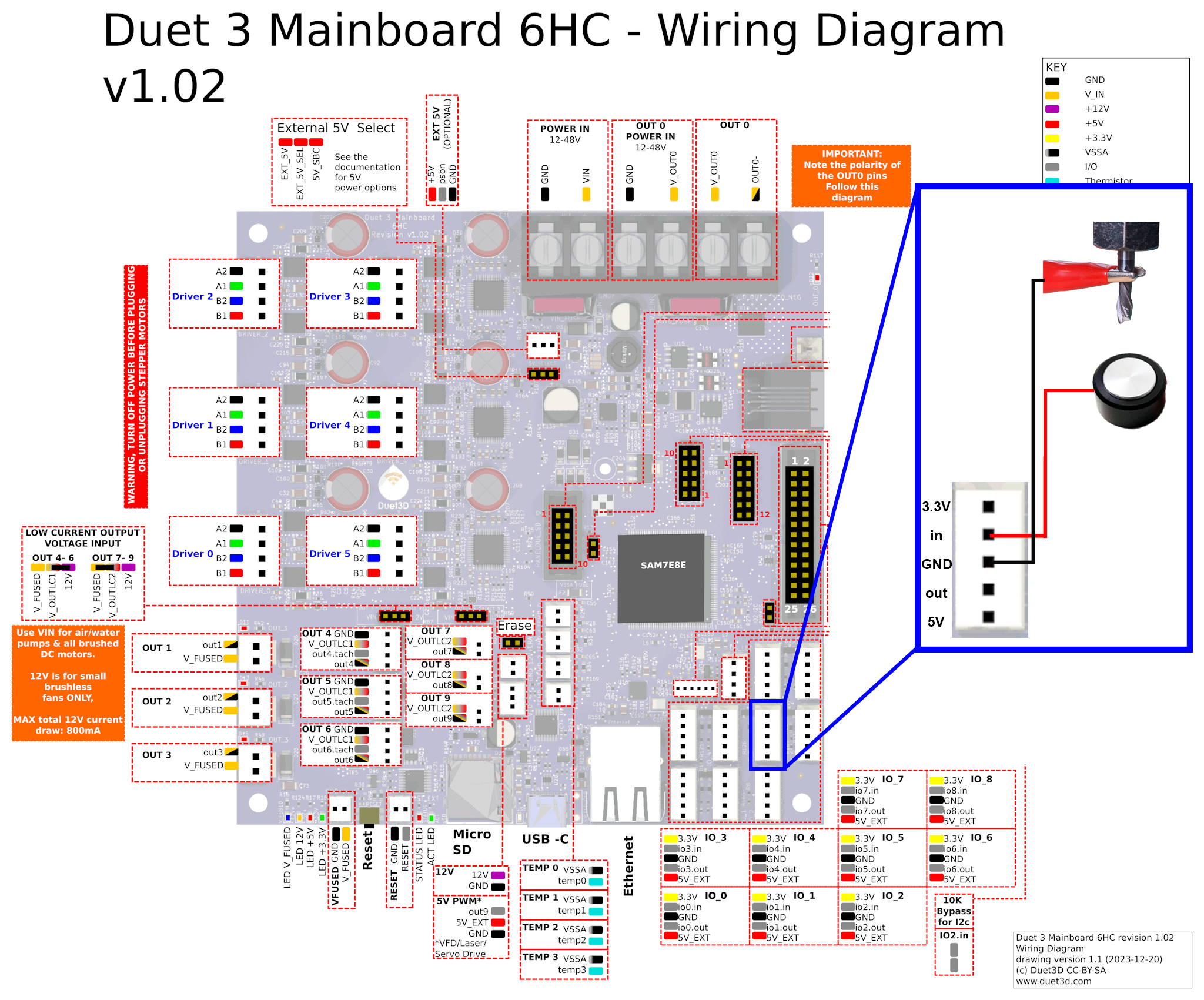
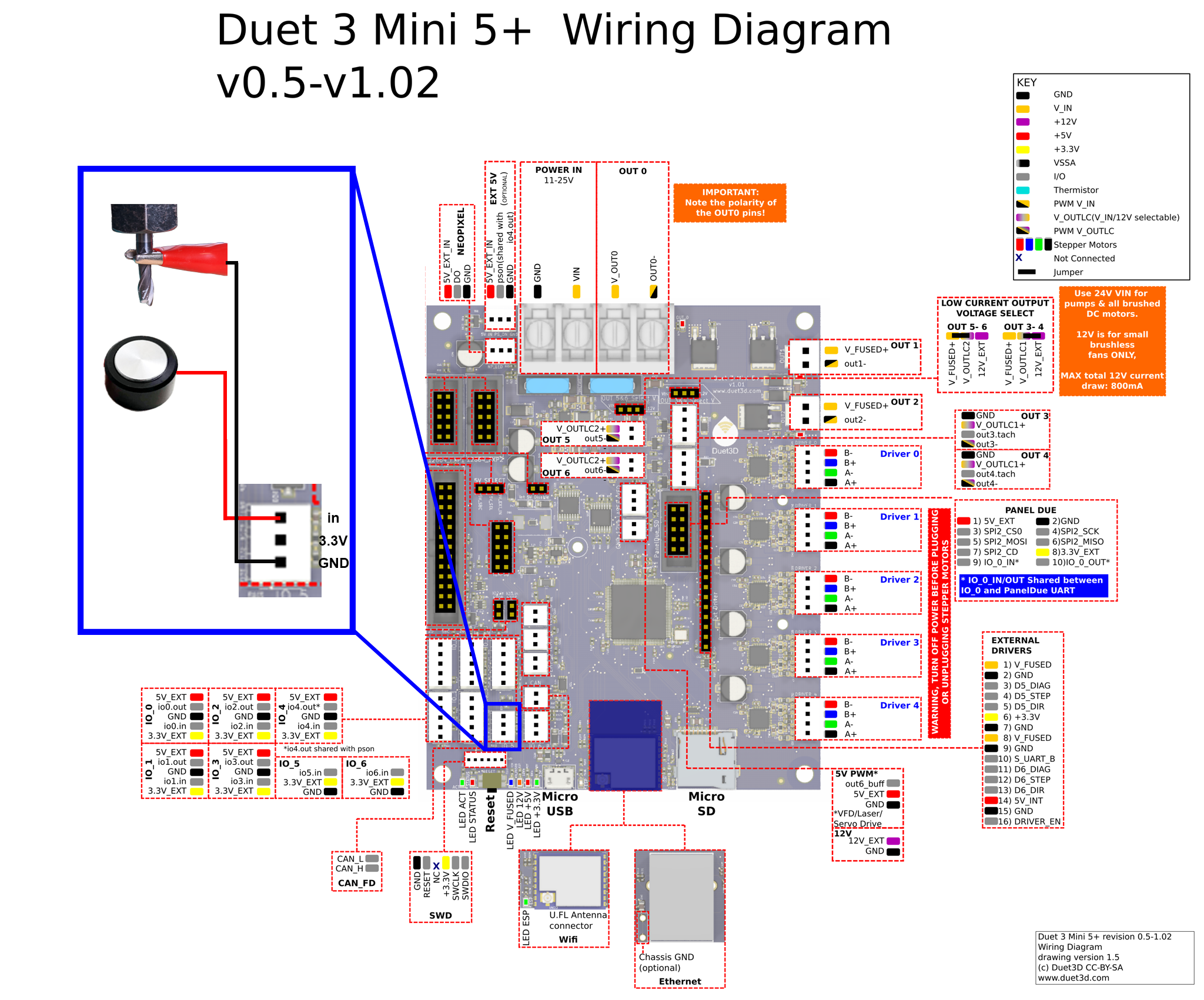
配布しているデフォルトのconfigではIO5をZプローブの入力に使用する設定としています。
このため、下記図のようにIO5のinとGNDをそれぞれタッチプレートと刃物に接続します。
プローブに使用するIO端子を変更するにはconfig.gの
M558 P5 C"!io◯.in"の行を変更してください。
IO5はDuet3 Mainboard 6HCとDuet3 Mini5+でコネクタ形状が異なります。
Duet3 6HCでは5ピン、Duet3 Mini5+では3ピンの端子となっています。
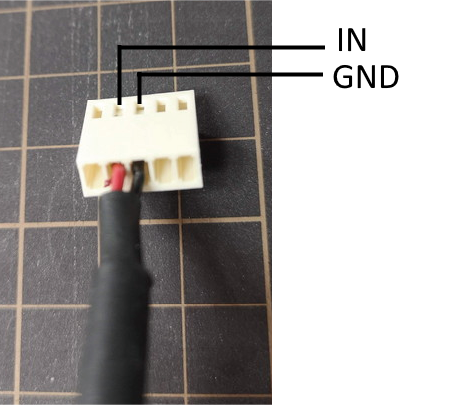
また、Duet基板のIO端子接続する場合はコネクタを作成する必要があります。
リミットスイッチ用のケーブルと配列は同じとなります。
コネクタ部作成済みの商品もございます。
参考:
https://docs.duet3d.com/en/User_manual/Connecting_hardware/Z_probe_connecting
側面にPROBE端子があります。クリップをGND、タッチプレートをSIGに接続します。
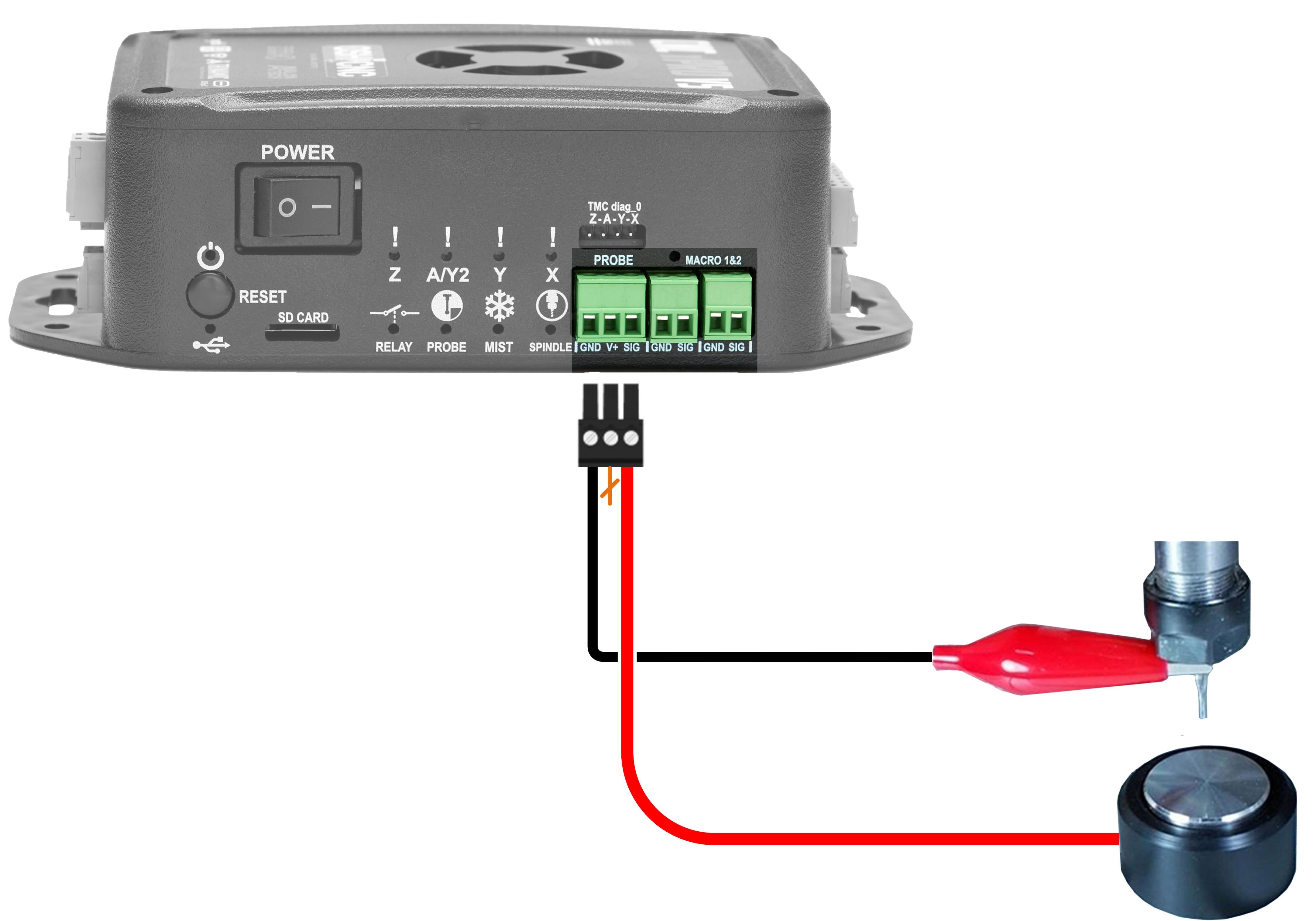
GNDとSIGは逆でもほとんど動作しますが、誤動作する報告がありますのでご注意ください。
¶ 動作確認
以下の順で動作を確認してみましょう。
- 手動でクリップとタッチプレートをタッチ
- エンドミルに取り付けてタッチ
¶ 検知状態の確認方法
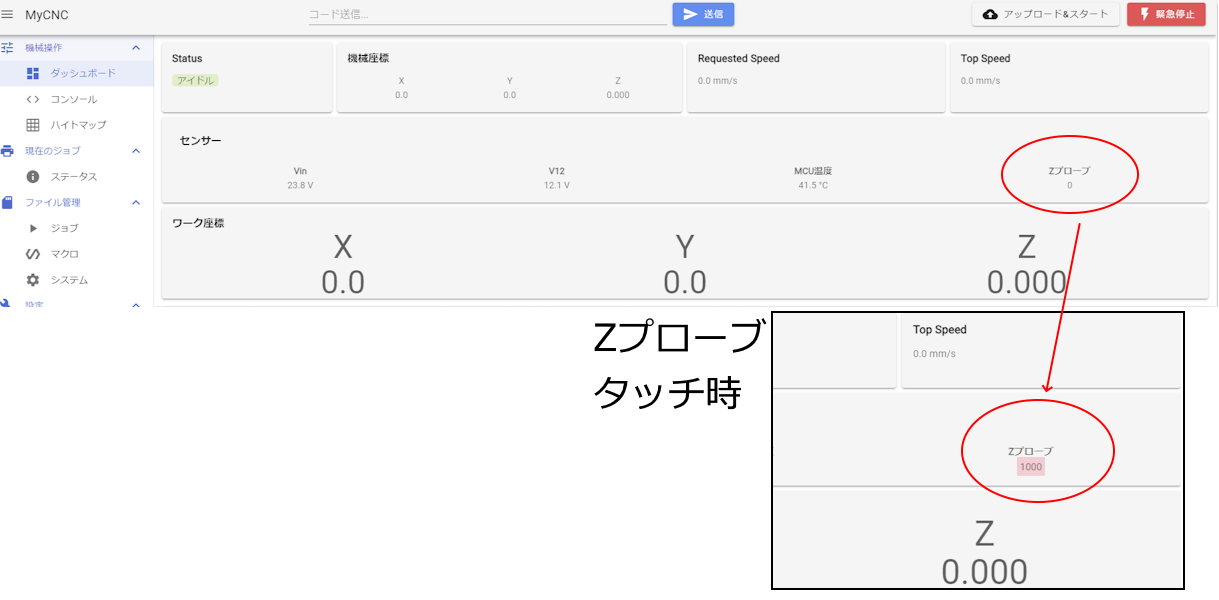
configにてZプローブの設定が行われている場合、WEBUI上にZプローブの検出状態が表示されるようになります。
タッチすると表示が変化します。
下記画像では1000と表示されている場合がタッチを検出している状態です。
本体側面部にプローブの状態を示すインジケータがあります。
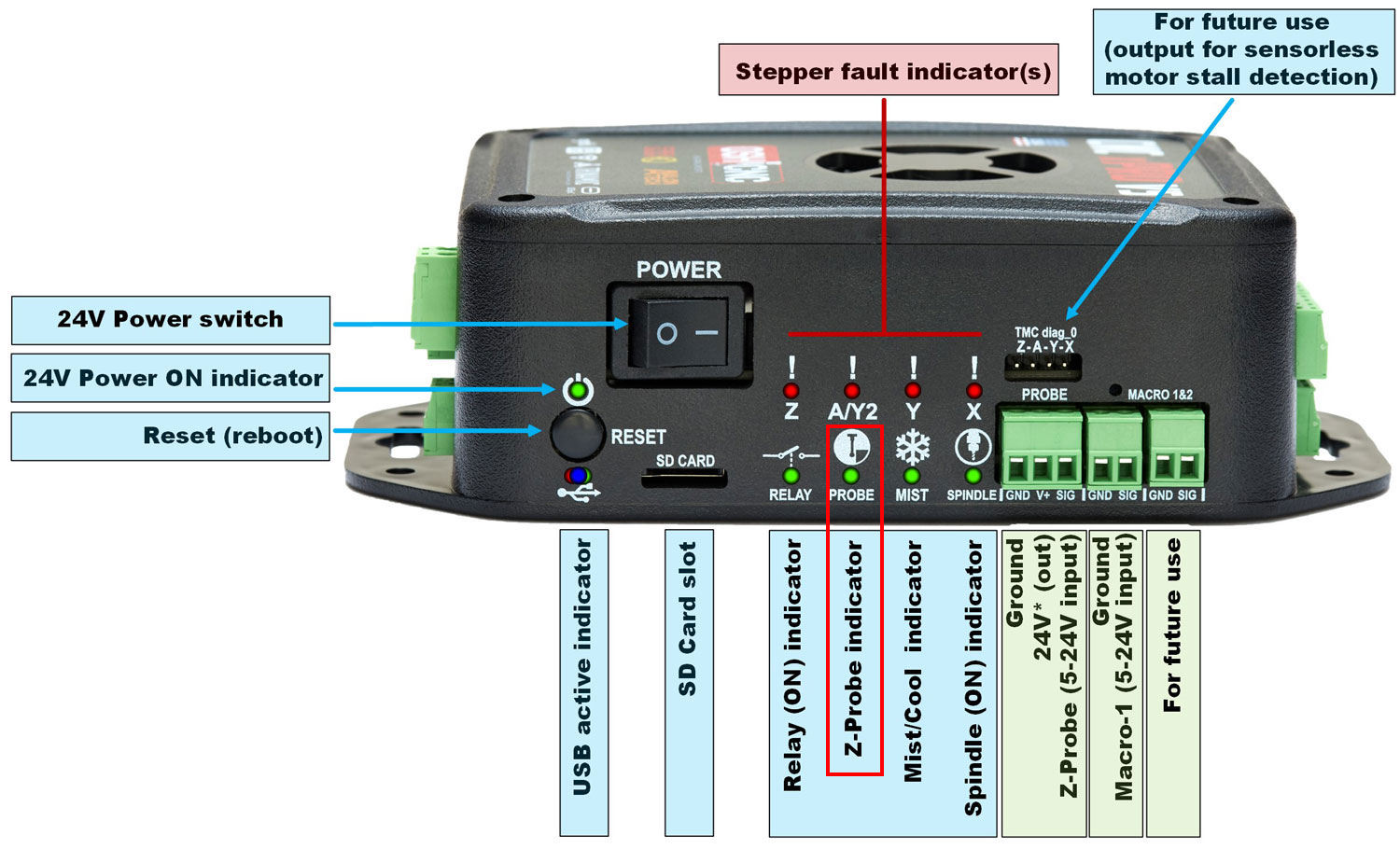
(from: https://github.com/Spark-Concepts/xPro-V5/wiki/Side_Panel#probe-input )
¶ 使い方
下記マクロをダウンロードし、DuetWebControlのマクロ画面にアップロードします。
zprobe.g

アップロードしたファイルを右クリックしてファイルを編集を選択すると編集モードに入ることができます。
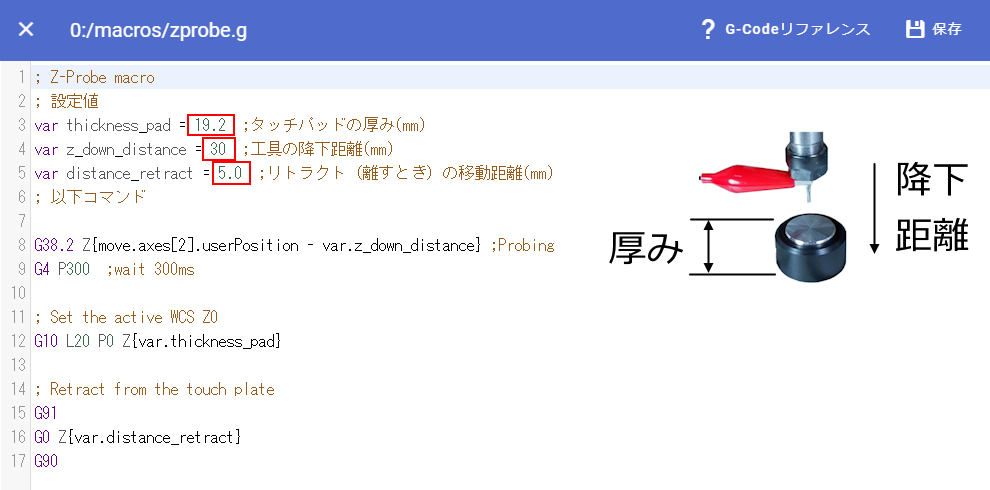
ここでいくつか設定値を使っている環境に合わせて変更します。
| 設定値 | 意味 |
|---|---|
| thickness_pad (タッチパッドの厚み) | タッチプレートの厚みを測って値を変更しておきます。 タッチプレートと刃物が接触し導通が確認されると、この厚さの値をオフセットした位置にワーク原点がセットされます。 |
| z_down_distance (工具の降下距離) | 現在の高さからZを下げたい移動量を入力します。 この値以上にZは移動することはありません。移動距離以内にタッチプレートとの導通が検知されなかった場合はエラーで停止します。 |
| distance_retract (リトラクトの移動距離) | タッチプレートに刃物がタッチした後に刃物を上げる移動距離を設定します。 |
マクロはダッシュボードから実行可能です。
タッチプレートを材料の上に置き、刃物をタッチプレートの上部に移動させた後にzprobeのマクロボタンを押します。
Zプローブが実行されワーク原点(Z=0)がタッチプレートの底面位置 = 材料上面位置にセットされます。

実行するときはZ軸の位置がテーブルより十分に高いこと、リトラクションの距離分(画面で指示します)は上昇する余裕がある状態で使用してください。
CNCjsのウィジェットにプローブコマンドがあります。
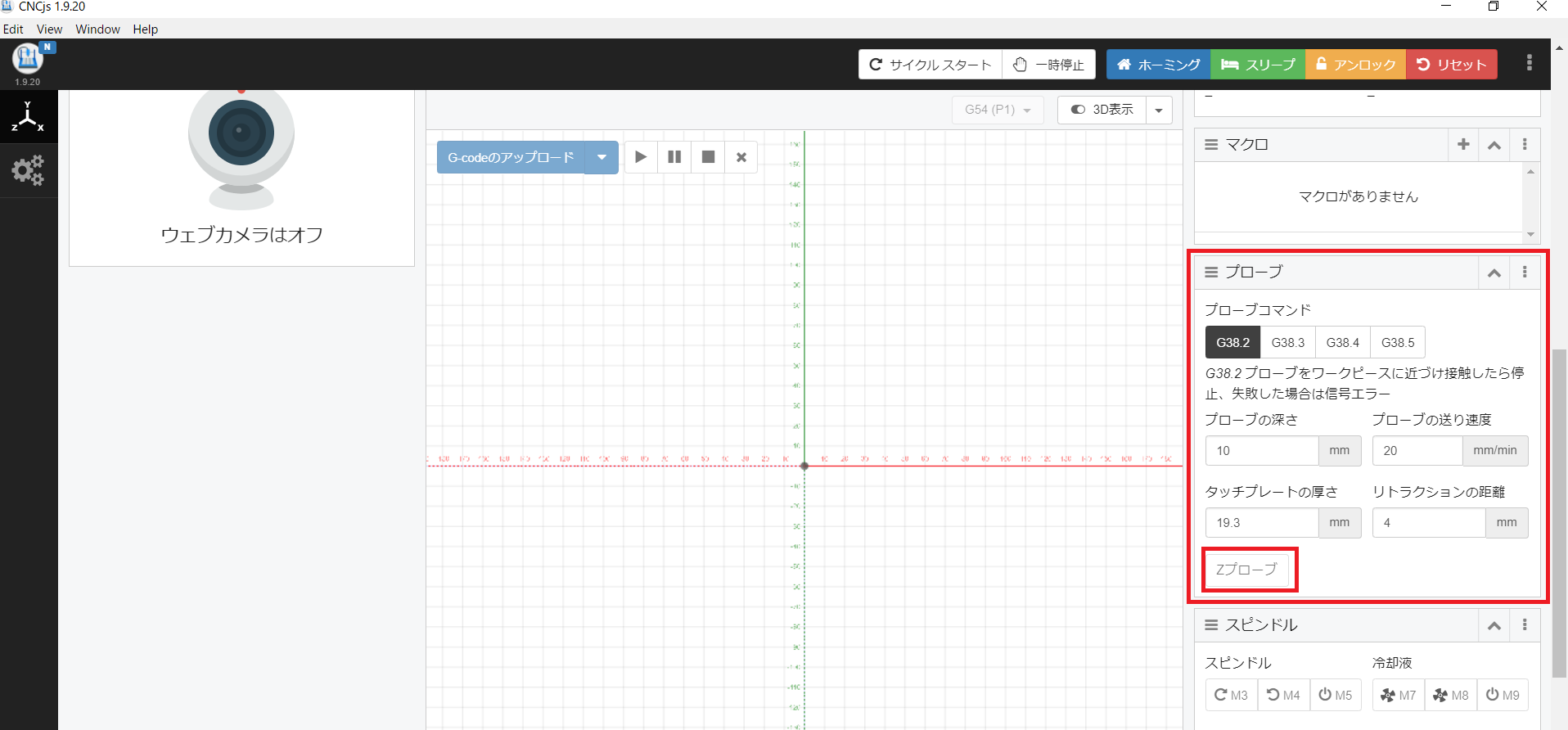
- G38.2、G38.3、G38.4、G38.5ボタン:プローブの動作を指定します。基本的にはG38.2を使用します。その他のコマンドはこちらをご参照ください。
- プローブの深さ:この値分下がってセンサーに触れなかったらプローブ失敗となって終了します。
- プローブの送り速度:エンドミルが下がる速度。
- タッチプレートの厚さ:センサーの厚みを測ってここに入力しておきます。
- リトラクションの距離:プローブが終わったあとにセンサーからエンドミルを退避させる量。
設定を入力し終えたら、エンドミルがZプローブの天面から10mm以内の高さまで手動で移動します。
Zプローブ コマンドを押すと確認ウィンドウが表示されるので実行します。
実行に成功するとZのワーク原点位置変更され、工具先端がタッチプレートの下をタッチする位置がZ=0となります。